普段、自宅ファイルサーバとして利用しているFreeNASですが、正常系は問題なく動作しているものの、トラブルが起きた場合の処置についてはこれまで調べてきませんでした。
そこで、今回ちょっと調べてみたいと思います。
まず、VMware上にFreeNAS9.1の32bit版をインストールしました。ホストシステムが32bit+PAEカーネルのLinuxMint13なので、FreeNASも32bit版を選択しました。
起動用のHDDは10GB、データ用のHDDはSCSIで10GB×2(それぞれのディスクに1A,1Bという名前を付けました)としました。
インストール自体は特に問題ありません。ホスト名などは適当にvmFreeNASとしました。
インストール後、パスワードを設定し、10GBのディスク2本で暗号化ありのZFSボリュームをミラーで作成しました。
これをCIFSで共有するわけですが、いつものことながら、今ひとつよくわかりません。設定してからLinux側から見えるようになるまで時間がかかるためでしょうか。
まあ、今回の目的は暗号化関連なのでよしとします。
適当なファイルをvmFreeNAS側に置いた状態で、今度は暗号化ZFSボリュームにパスフレーズをつけてみます。これまでは暗号化していてもパスフレーズもなしで運用してきました。
実験1:ディスクのみ持ち出した場合にどうなるのか?
仮想FreeNASサーバを2台動かして、1台目のディスク2台(ミラーなので)をコピーして、そのうちのディスク1台をFreeNASサーバ2台目に付けてみます。
普通にボリュームを作成しようとすると、中身のあるディスクとしては認識されず、初期化しようとします。つまり、ディスクを持ち出しても読み出せそうにありません。
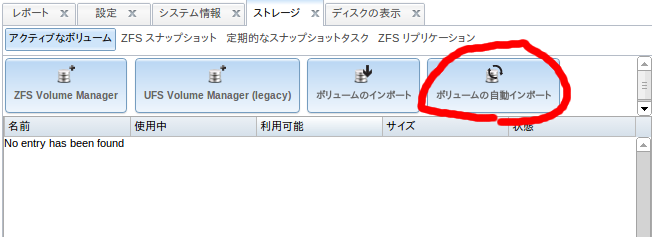
しかし、「ボリュームの自動インポート」を行うと、暗号化ボリュームをインポートするか聞いてきます。
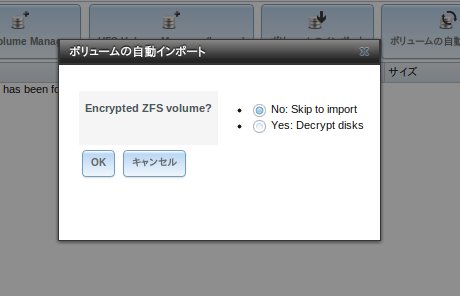
ここでYesを選んでOKを押すと、

暗号化キーを確認してきます。ここで、元のFreeNASサーバからエクスポートした暗号化キーのファイルを指定してやると・・・ボリュームも指定しろ、とエラーがでました。(下記)
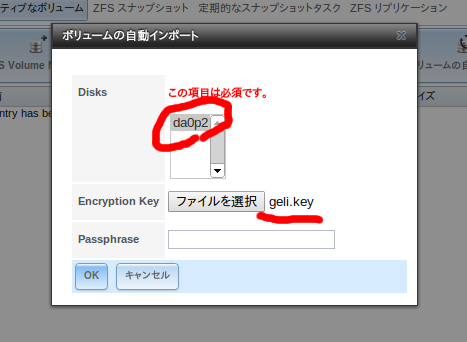
とにかく、両方指定してやると、

元のボリューム名を確認してきます。そこでOKを押すと、
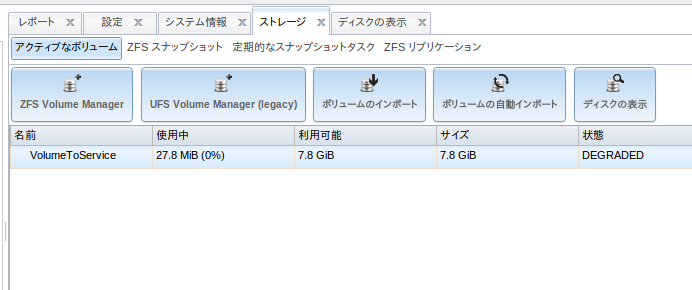
無事にインポートされました。シェルで中のファイルを見ると、確かに存在していそうです。ミラーしたディスクの片方しかマウントしていないので、DEGRADEになっていますが、とにかくファイルの救出はできそうな感じです。
なお、ミラーを構成する2つのディスクを接続してからボリュームの自動インポートを行い、ディスクを指定する際に2つとも指定してやるとミラーであることを認識してミラーディスクとしてインポートされました。
一度でも片方だけでインポートすると、一旦ボリュームをデタッチしてもミラーとしてはインポートされなくなるようです。(当然といえば当然な気がしますが・・)
実験1をまとめると、暗号化キーとミラーディスクの片方があればデータは復旧可能。
実験2:パスフレーズをつけたディスクは起動時にどうなるのか?
もう一つ気になっていたことがあります。暗号化キーにパスフレーズをつけた場合に、起動時に入力が必要なのかどうかです。これまでは起動時に入力するのは面倒なので、パスフレーズをつけずに運用していました。
一方で、考えようによってはパスフレーズを入力しなければ決して中身の見えないサーバとして運用することもできるかもしれないわけです。
というわけで、実験してみました。
先に2台のディスクのコピーを持ち込んだらHEALTHYに復帰した2台目の方で、パスフレーズをつけて再起動してみました。
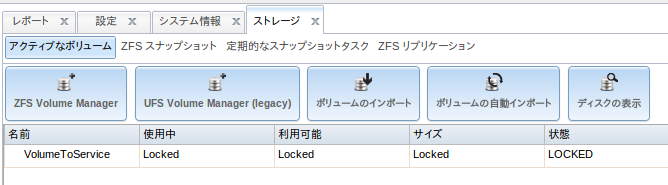
起動後、ボリュームはロックされた状態になりました。
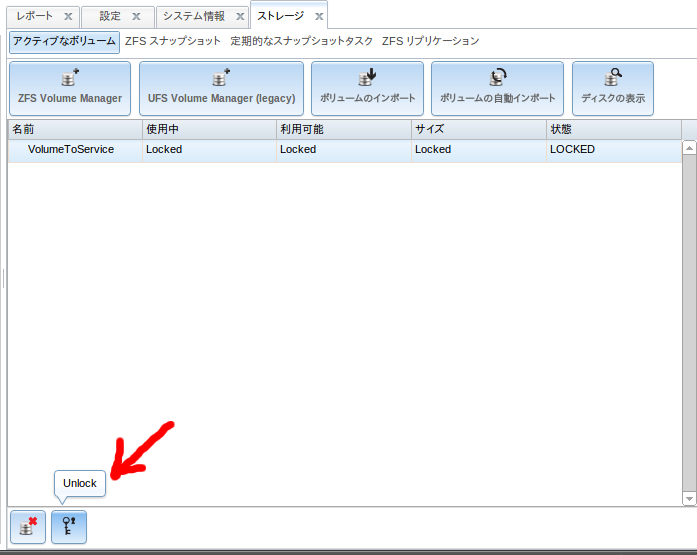
ロックされたボリュームを選択して、下の方のUnlockをクリックします。
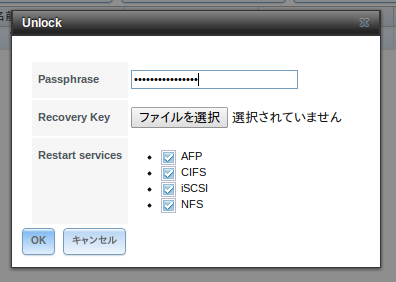
パスフレーズを入力して「OK」をクリックします。
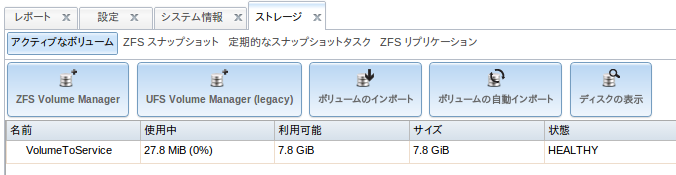
無事にアクセスできるようになりました。(正確にはCIFSでアクセスできるかは確認していません。例によって、見えたり見えなかったりが不安定なので。シェルでディレクトリやファイルの存在を確認しただけです。)
実験2のまとめ:パスフレーズを設定すると、起動後にパスフレーズを入力するまではアクセスできない。