雑多なデータはやはりWindows上にあることが多いので、Windowsから暗号化できないと面倒である。仕方がないので、Windows側にTrueCryptを導入して、暗号化パーティションを作成することにした。TrueCrypt(http://www.truecrypt.org/)は「オープンソースの暗号化された仮想ディスクを作成・利用するソフトウェア」(Wikipediaによる)である。詳しくは、Wikipediaの方を参照されたい。
単純にWindowsであればOSの暗号化機能でも良さそうな気もするが、ディスク自体は外付けであり、過去にOSの再インストール時に読めなくなったことがある(このときは他にバックアップがあって助かった)ので、やっぱり外だしのツールのほうが安心かも、ということである。
そんなこんなで、まずダウンロードする。TrueCryptのダウンロードのページにいくと、ダウンロードのリンクとPGP signatureのリンクがある。ダウンロードしたファイルの検証方法は PGP Signature のリンクを押すと表示されるが、Windows版の場合は電子署名を確認してもOKだよ、ということみたいである。よって、ダウンロードしたファイルをエクスプローラで右クリックして、プロパティを表示して確認していく。
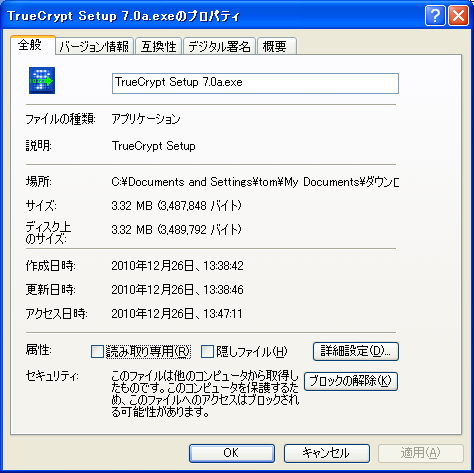 |
| プロパティを開いたところ。デジタル署名のタブをクリックする。 |
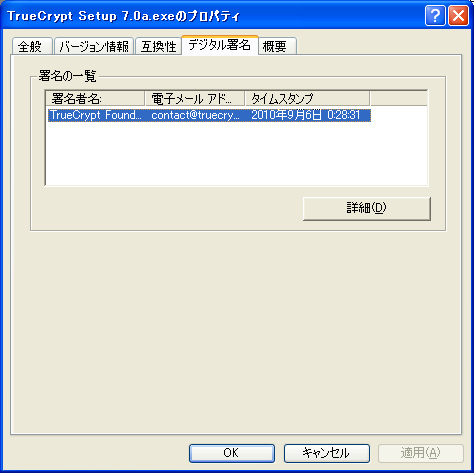 |
| すでに選んであるが、TrueCrypt Fundation の署名を選択して「詳細」を押す |
 |
| ここで「このデジタル署名は問題ありません」と出れば、OKみたいである。 |
引き続き、実行形式のファイルをダブルクリックして、インストールを行う。
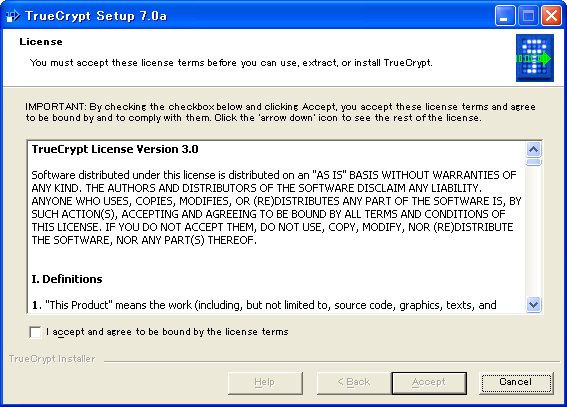 |
| お約束のライセンス確認である。中身を読んでチェックを入れて「Accept」を押す。 |
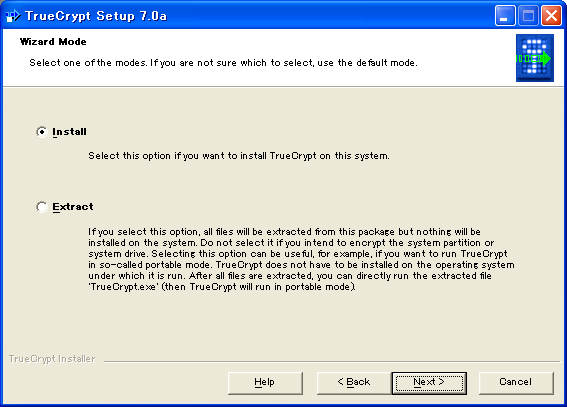 |
| インストールするのか、展開だけなのかを選ぶ。 展開だけを行う場合は、「システムドライブの暗号化を行う場合」と 「ポータブルモードで動作させる場合」のようである。 展開したファイルの実行形式をダブルクリックすると ポータブルモードで動作するらしい。 |
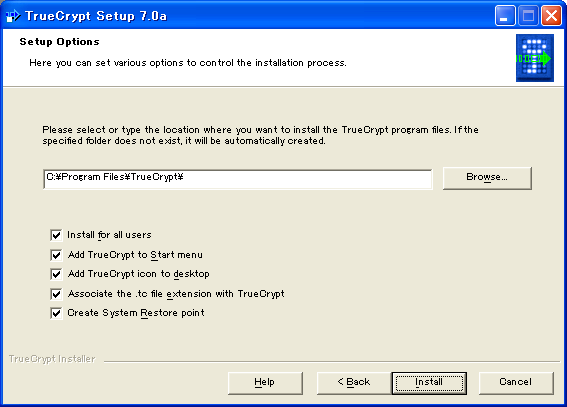 |
| セットアップオプションを選ぶ。標準のままにした。 |
 |
| インストールの過程が表示される。 完了すると、完了のメッセージが出る。 |
 |
| 「初めて使うんだったら、チュートリアルを読むことをお勧めするよ、 チュートリアル見たい?」ということなので、「はい」を押す。 |
 |
| 「はい」を押すと、TrueCryptのチュートリアルのページが開く |
ということで、インストール自体はいたってシンプル。あっさり終わりました。